
Aplicaciones robotizadas inteligentes para la manipulación de grandes cargas
JATORMAN e IK4-TEKNIKER desarrollan una solución para la manipulación de grandes cargas de manera flexible y multifuncional, procurando a la vez una mayor precisión y automatización en los distintos procesos a realizar, reduciendo de esta manera los costes y tiempos productivos.
Históricamente, las empresas industriales han recurrido a maquinaria dirigida de manera manual, como grúas-puente o posicionadores fijos, para manipular todo tipo de piezas pesadas que se emplean en infinidad de procesos de montaje, mecanizado, almacenaje o traslación.
Sin embargo, los procesos actuales de fabricación y montaje requieren mover piezas extremadamente pesadas de manera precisa y segura. Sectores como el de las renovables o el de la automoción necesitan soluciones tecnológicamente avanzadas para la manipulación de cargas pesadas, que les permitan realizar diferentes operaciones sobre la carga, con el objetivo de reducir los tiempos de espera y ahorrar el espacio en planta.
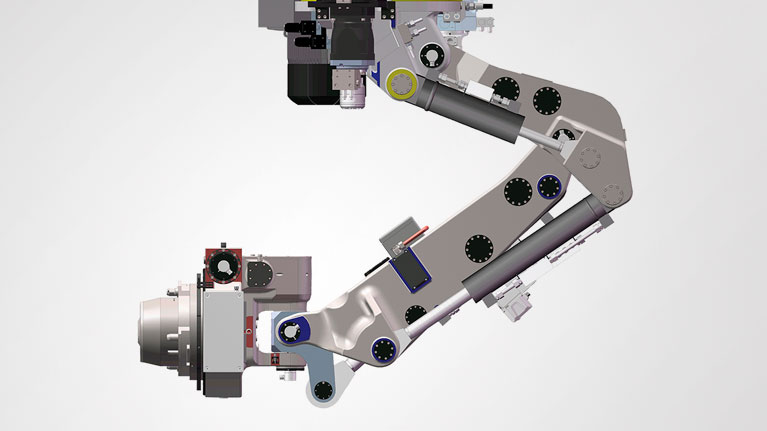
Para hacer frente a este reto, IK4-TEKNIKER ha colaborado intensamente con la empresa especializada en soluciones de ingeniería JATORMAN con el fin de desarrollar un brazo robótico hidráulico dotado de visión artificial e inteligencia. Este manipulador, patentado por JATORMAN, es capaz, una vez acoplado al puente grúa, de manipular cargas de hasta tres toneladas de modo preciso y seguro.
Para desarrollar esta solución, se ha llevado a cabo, en primer lugar, un estudio de viabilidad técnica y económica totalmente personalizada para analizar las necesidades de automatización requeridas.
En segundo lugar, se ha desarrollado una gran parte de simulación, diseño mecánico y dimensionamiento. Desde el punto de vista de la ingeniería de control, el diseño y desarrollo de la solución ha supuesto un desafío tecnológico. El brazo robótico controla de manera autónoma sus diferentes actuadores, y así sigue una trayectoria según la estrategia de manipulación determinada.
Su programación y control, basado en una interfaz inalámbrica, se ejecuta mediante lenguaje estándar CNC, un sistema que posibilita varias trayectorias por coordenadas o “teaching”, que facilita su adaptación a diferentes escenarios de trabajo y permite su manipulación remota en entornos agresivos o inaccesibles.
El siguiente paso, fue el desarrollo de una solución piloto y la puesta en marcha del sistema de control del brazo robótico; así como del puente grúa cuando este actúa de forma coordinada con el brazo.
El brazo robótico está programado para realizar giros, volteos, alineamiento, alimentación y manipulación de todo tipo de piezas de hasta tres toneladas con una precisión milimétrica. Dispone, además, de un sistema que facilita el intercambio automático de garras, con el objetivo de adaptarlas a las características de la carga que se necesite mover.
IK4-TEKNIKER ha integrado también en el brazo robótico, un sistema de sensorización que dota a la solución de automatización de versatilidad creando un entorno de trabajo colaborativo persona-robot apoyado en el expertise del centro tecnológico.
En este sentido, la solución desarrolla de manera segura diversas tareas como la carga y descarga de piezas y utillaje pesado sobre máquina-herramienta, manipulación en montaje, cambio de troqueles o diferentes tipos de paletización, en especial cuando se trata del traslado de materiales peligrosos como productos químicos, radiactivos o incandescentes.
El desarrollo está provisto además, de un soporte de “parking” o estacionamiento que desacopla fácilmente el brazo robótico de la grúa-puente para que esta pueda trabajar libremente. Mediante un sencillo intercambio y con el mismo brazo robótico es posible que este se traslade por varias zonas de trabajo, posibilitando la concatenación de diferentes procesos, reduciendo costes y tiempos productivos.
Una vez realizado el montaje y la puesta a punto, IK4-TEKNIKER y JATORMAN han desarrollado conjuntamente un procedimiento interno de formación, tanto para el personal de la compañía navarra como para futuras implantaciones.